传统无人机使用视觉传感器进行导航。然而,潮湿、弱光和灰尘等环境条件会阻碍其有效性,限制其在受灾地区的使用。日本的研究人员通过将机器人元件与蚕蛾的气味感应天线相结合,开发出了一种新型生物混合无人机。他们的创新将机器人的灵活性和精确性与生物传感机制相结合,可以增强无人机在导航、气体感应和灾害响应方面的适用性。
技术进步推动了无人机的发展,其应用范围广泛,包括导航、气体传感、基础设施和交通、成像和灾难响应。无人机的传统导航系统依赖于热成像和光检测与测距 (LiDAR) 等视觉传感器。
然而,弱光、灰尘和潮湿等环境条件可能会损害其功能,因此需要更多用途的替代品。
自然界中的动物、鸟类和昆虫都具有基于嗅觉的固有导航系统,这有助于它们找到食物来源、躲避捕食者并吸引潜在配偶,从而提高它们的总体生存率。昆虫,尤其是雄蛾,可以通过一种称为气味源定位的过程,从远处探测到风媒性信息素,在某些情况下,这种过程可以延伸到几公里远。
将这些生物传感机制与先进的人工机械相结合的生物混合无人机在克服现有技术机器人技术所面临的挑战方面具有重大的前景。
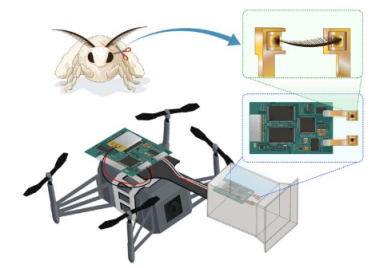
先进生物混合无人机的全图,展示了蚕蛾天线及其集成传感器外壳。图片包括一个示意图,说明了触角电位图 (EAG) 传感器(即气味传感器)与其外壳之间的相互关系,突出了增强气味检测灵敏度和系统效率的创新设计。图片来源:日本信州大学 Daigo Terutsuki 博士
在此背景下,日本信州大学纺织科学与技术学院机械工程与机器人学系副教授 Daigo Terutsuki 以及日本千叶大学副教授 Toshiyuki Nakata 和 Chihiro Fukui 领导的研究团队,利用蚕蛾触角开发出一种能够感知气味和跟踪的新型生物混合无人机。
Terutsuki 博士解释了他们进行这项研究的动机:“我们的团队正在继续开发利用活体昆虫触角作为气味传感器元件的生物混合无人机。在这项研究中,我们努力结合生物体的动态运动和机制,以大幅提高我们的气味追踪无人机的性能。”
“我们开展这项研究是因为相信这些进步将实现更有效的气味检测并拓宽在救援行动中的应用。”