导读近年来,机器人专家和计算机科学家开发了一系列受自然界(尤其是人类和动物)启发的系统。通过重现动物的动作和行为,这些机器人可以更有效地...
近年来,机器人专家和计算机科学家开发了一系列受自然界(尤其是人类和动物)启发的系统。通过重现动物的动作和行为,这些机器人可以更有效地在现实世界中导航。
中国东北大学的研究人员最近开发了一种新型 H 形仿生机器人,可以模仿猎豹奔跑时的动作。《仿生工程杂志》发表的一篇论文介绍了这种机器人,它基于压电材料,这种材料在受到机械应力时会产生电荷。
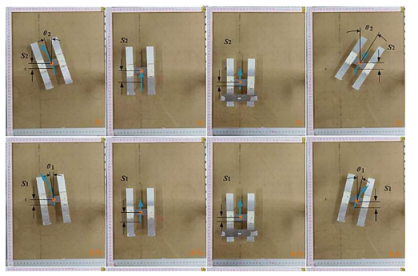
李英、李超峰及其同事在论文中写道:“压电机器人通过电压差动驱动方法实现了直线运动、转弯运动和不同半径的转弯运动。”“制造了一个重量为 38 克、尺寸为 150 × 80 × 31 立方毫米的原型。 ”
李、李和他们的同事开发的新型 H 形仿生压电机器人 (H-BPR) 有四条腿,由三根压电梁连接。为了模仿猎豹的奔跑步态,机器人利用压电梁的弯曲振动,使其四条腿周期性地移动。
研究人员写道:“首先对压电机器人进行动力学和运动学分析,得到压电机器人腿部末端某点的运动轨迹。分析压电机器人的运动原理,然后利用有限元分析软件对压电机器人进行模态分析和谐响应分析。”
与其他利用压电材料中的波移动的机器人相比,这些研究人员开发的新系统设计更简单,因此更容易制造。此外,它可以产生更广泛的运动,因为它的运动和转动半径可以通过调节施加在其上的电压来调整。
到目前为止,李教授及其同事已经开发出该机器人的基本原型,该机器人还可以承载小负载。不过,未来其设计还可以进行调整,以集成微型传感器或摄像头,从而拓宽机器人的功能。
研究人员在一系列真实世界中测试了他们开发的原型,并取得了令人鼓舞的结果。总体而言,该机器人被发现可以很好地模仿猎豹的跑步步态,同时还能成功爬上不同坡度的斜坡。