导读中国科学院沈阳自动化研究所的研究人员开发出了一种多模式游泳软体机器鱼。该设计从自然鱼类的高灵敏度侧线传感系统和先进的肌肉驱动机制中...
中国科学院沈阳自动化研究所的研究人员开发出了一种多模式游泳软体机器鱼。该设计从自然鱼类的高灵敏度侧线传感系统和先进的肌肉驱动机制中汲取灵感,将驱动、感知和控制功能融为一体,为水下机器人技术带来重大进步。
该研究于 1 月 21 日发表在《IEEE 机器人学报》上,展示了一种可以执行四种不同游泳模式的软体机器鱼,其多功能性和感知能力均超越同类系统。
该研究在三个关键领域取得了重大进展:多驱动单元的协同控制策略、灵活嵌入式传感系统的实现以及智能环境自适应模式切换。
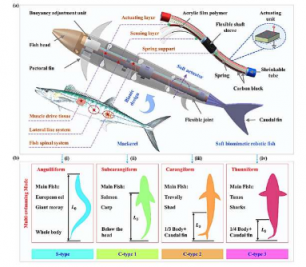
通过模仿鲭鱼的生物结构,研究人员利用 3D打印技术设计了一种柔性仿生结构,并搭配了柔性执行器。该执行器集成了三个按功能层排列的专用组件:压缩弹簧、介电弹性体膜和柔性电极。
为了复制鱼的侧线系统(用于检测运动和环境变化),研究人员开发了高精度柔性应变传感器。这些传感器使机器鱼能够感知其游泳状态和周围流体环境的变化,从而使其能够自适应地切换到最佳游泳模式。
此外,通过协同控制多个仿生肌肉单元的激励幅度和顺序,机器鱼成功再现了自然鱼类的多种游泳模式,并适应不同的游泳环境。