目前人类完成的许多工业流程和家务都需要处理纺织品,包括衣服、床单、毛巾、布和其他基于织物的物品。迄今为止开发的大多数机器人系统都无法可靠地处理所有类型的纺织品,因为预测这些物体在被抓取和处理时会如何变形存在挑战。
工业信息机器人研究所 (CSIC-UPC) 和加泰罗尼亚理工大学的研究人员编制了一个新的数据集,可用于训练机器人算法以预测布料的变形并设计有效的操纵策略。
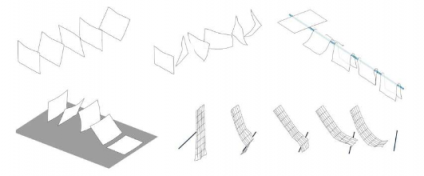
该数据集发表在《国际机器人研究杂志》的一篇论文中,是使用运动捕捉(MoCap) 系统收集的,该系统拾取并跟踪放置在不同纺织品上的标记的红外光。
论文第一作者 Franco Coltraro 告诉 Tech Xplore:“机器人自动操作布料是一种潜在的应用,可能会对社会和工业产生深远影响。”
“如今,无论是在家里还是几乎任何与布料相关的企业,纺织品都是由人工手动处理的。想想商店里折叠布料、酒店里铺床、处理网上购物服装的退货:一切都是由人处理的。
“原因很简单:自动操纵布料非常困难,因为布料会非常自由地变形,会与自身发生碰撞,并且会以非常复杂的方式与空气相互作用。因此,需要解决无数的数学和工程问题才能实现自动布料操纵。”
近年来,一些研究人员一直在尝试利用人工智能 (AI) 克服机器人布料操控方面的挑战。然而,要想取得良好效果,大多数基于人工智能和机器学习的模型都需要在大量数据上进行训练。
“有许多不同的布料模拟器(大多数来自视频游戏和动画行业),”科尔特拉罗说。
“我甚至开发了一个。问题是,大多数布料模拟器不是为机器人设计的,而是为电影和视频游戏设计的;因此,它们中的大多数都不太逼真。少数逼真的布料模拟器(例如,如果我可以这样说的话,我的)具有需要调整或估计以适应真实服装行为的参数。”
Coltraro 及其同事最近进行的研究的主要目标是汇编一个新的高质量数据集,以帮助改进布料模拟器生成的数据。为此,他们使用 MoCap 系统收集了 120 条记录,显示了各种纺织品的运动。